Mitsubishi - RV-7FRLM-D EE-ROB-MIT-2011-00001
Onko sinulla lisäkysymyksiä? Ota meihin yhteyttä!

Borja Garcia
+34 679 019 350
b.garcia@gindumac.com
- GINDUMAC
- Tuotteet
- Automaatiolaitteet
- ➤ Käytetty Mitsubishi RV-7FRLM-D myytävänä | gindumac.com
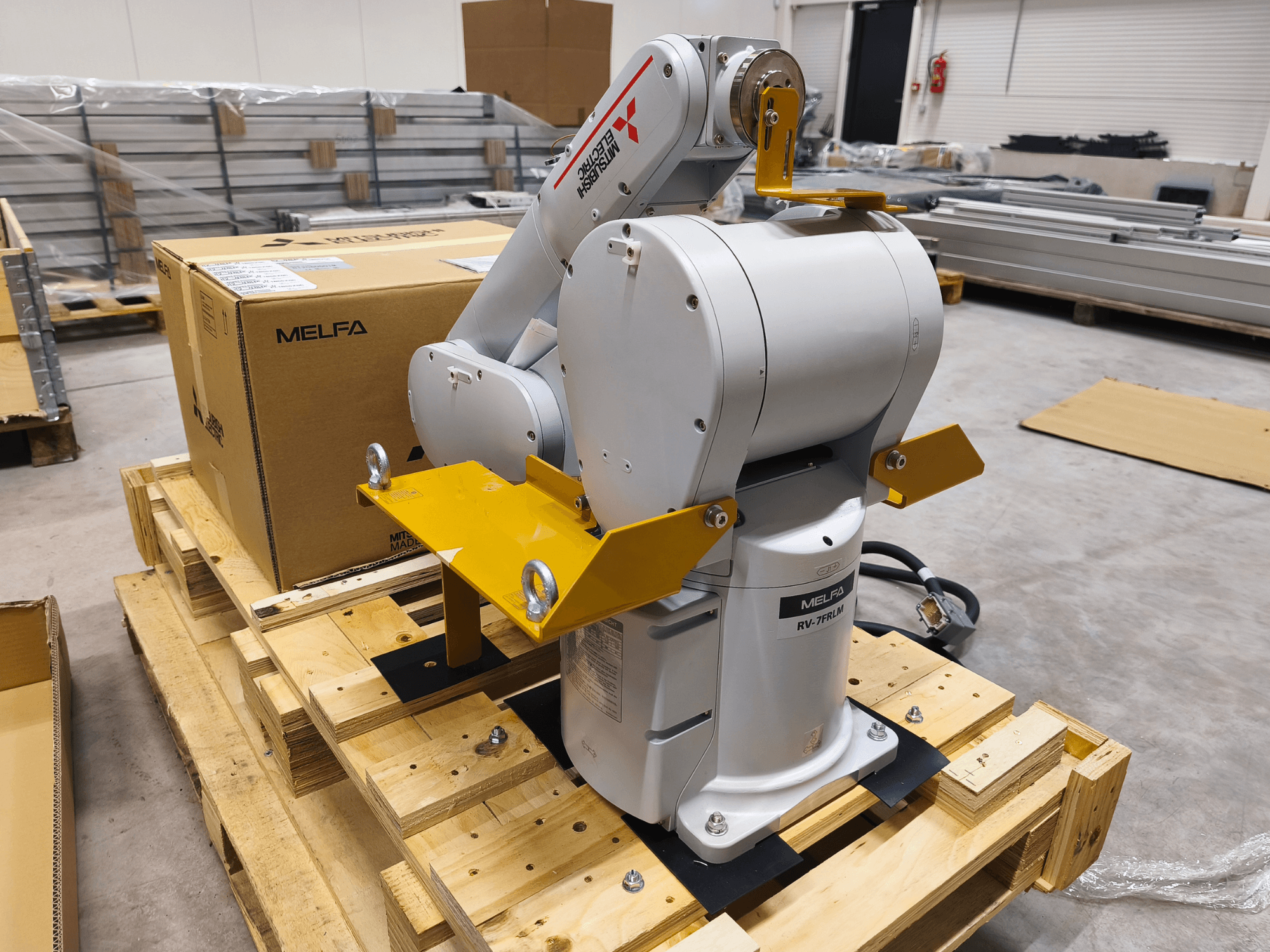
Tämä 6-akselinen Mitsubishi RV-7FRLM-D -robottivarsi on valmistettu vuonna 2011. Siinä on pystysuora moninivelrakenne, joka pystyy käsittelemään enintään 7 kg:n kuormaa ja jonka ulottumissäde on 908 mm. Robotti on varustettu vaihtovirtaservomoottorilla, ja se voidaan asentaa lattialle, kattoon tai seinälle. Se toimii tehokkaasti 0,35 sekunnin sykliajalla, ja sen suojausaste on IP67. Harkitse mahdollisuutta ostaa tämä Mitsubishi RV-7FRLM-D -robottivarsi. Ota yhteyttä saadaksesi lisätietoja.
Yleiskatsaus
- merkki: Mitsubishi
- vuosi: 2022
- MALLI: RV-7FRLM-D
- sovelluksen tyyppi: Robotiikka
- Sijainti: Viro
- koneen tyyppi: Robotin käsivarsi
Lisäinformaatio
Rakenne: Pystysuora moninivelinen tyyppi
Ympäristötiedot: Öljysumu
Suojausaste: IP67
Asennus: Seinäasennus: Lattia / katto / seinäasennus
Vapausasteet: 6
Käyttöjärjestelmä: AC-servomoottori (kaikki akselit jarrulla)
Sijainnin tunnistus: Absoluuttinen kooderi
Kuormituskapasiteetti maksimi: 7 kg/ Nimelliskapasiteetti: 7 kg/ Nimelliskapasiteetti: 7 kg: 7 kg
Ylävarsi: 435 mm
Etuvarsi: 470 mm
Suurin ulottumissäde: 908 mm
J1: -240° - +240°
J2: -110° - +130°
J3: 0° - +162°.
J4: -200° - +200°
J5: -120° - +120°
J6: -360° - +360°
J1: 288 astetta sekunnissa
J2: 321 astetta sekunnissa
J3: 360 astetta sekunnissa
J4: 337 astetta sekunnissa
J5: 450 astetta sekunnissa
J6: 720 astetta sekunnissa
Suurin yhdistelmänopeus: 11000 mm/sek.
Syklin kesto: 0,35 sekuntia
Sijainnin toistettavuus: ±0,02 mm
Ympäristöolosuhteet Ympäristölämpötila: 0-40°C /Robotin massa: 0-40°C /Robotin massa: 0-40°C /Robotin massa: 0-40°C 67 kg
Sallittu vääntömomentti
J4: 16,2 Nm
J5: 16,2 Nm
J6: 6,86 Nm
Sallittu hitausmomentti
J4: 0,45 kg-m²
J5: 0,45 kg-m²
J6: 0,10 kg-m²
Työkalun liitännät Työkalun johdotus:
8 sisääntuloa / 8 ulostuloa tarttujalle.
Monitoimikouran ja anturin signaalikaapeli
LAN × 1 (100BASE-TX)
Työkalun pneumaattiset putket:
Ensisijainen: Ø6 × 2
Toissijainen: Ø4 × 8
Ohjain kytketty Ohjaimen tyyppi: CR800-07VD /Control Type: CR800-07VD /Control Type: CR800-07VD /Control Type: CR800-07VD Standalone
*Emme vastaa mahdollisista virheistä ilmoituksessa, koneen tekniset tiedot tulee varmistaa edustajan kanssa.
Borja Garcia
Maksuehdot
Ennakkomaksu
Omaisuuserien rahoitus